
深圳先進院:液態金屬柔性可拉伸傳感器取得新進展
2019-04-12 15:59:51
作者:本網整理 來源:深圳先進技術研究院
分享至:


近日,中國科學院深圳先進技術研究院生物醫學與健康工程研究所微創中心在超高可拉伸柔性傳感器的研究領域取得新進展,相關論文Microchannel Structural Design For a Room-Temperature Liquid Metal Based Super-stretchable Sensor(基于微通道結構設計的室溫液態金屬超高可拉伸傳感器研究)在Scientific Reports期刊在線發表( DOI: 10.1038/s41598-019-42457-7)。該論文提出了一種微通道的優化設計,提高基于液態金屬柔性可拉伸傳感器的靈敏度。論文第一作者是深圳先進院客座碩士研究生高欽武,通信作者是王磊研究員和李暉副研究員。
柔性傳感器是可穿戴醫療、機器人等領域的研究熱點。柔性應變傳感器已經成為未來發展智能器件的重點研究方向,其在人機交互系統、電子皮膚、人體運動行為監測系統等領域具有廣闊的應用前景。其中,可拉伸性、靈敏度、穩定性、可靠性和舒適性是應變傳感器的重要性能指標,如何在實現高可拉伸性的同時大幅度提高靈敏度和可重復性仍然是目前面臨的一個挑戰。
為此,該課題組成員提出了一種基于微通道的優化設計、利用液態金屬制備的柔性可拉伸傳感器的方法。研究團隊利用有限元仿真優化結果,設計制備柔性可拉伸傳感器,實驗結果表明該柔性傳感器可在590%的拉伸,270o扭轉和180o彎曲的情況正常工作。當拉伸550%,靈敏度GF可達4.95,拉伸重復率誤差<0.1%,為實現人體手指、手腕等關節等運動精準測量提供了可行性方法,充分展示了其在柔性可穿戴電子設備領域的良好應用價值。
該研究得到了國家自然科學基金-深圳機器人聯合基金重點支持“穿戴式精確定位介入手術機器人的力覺感知與導絲操控機理(U1713219)”等項目的資助。
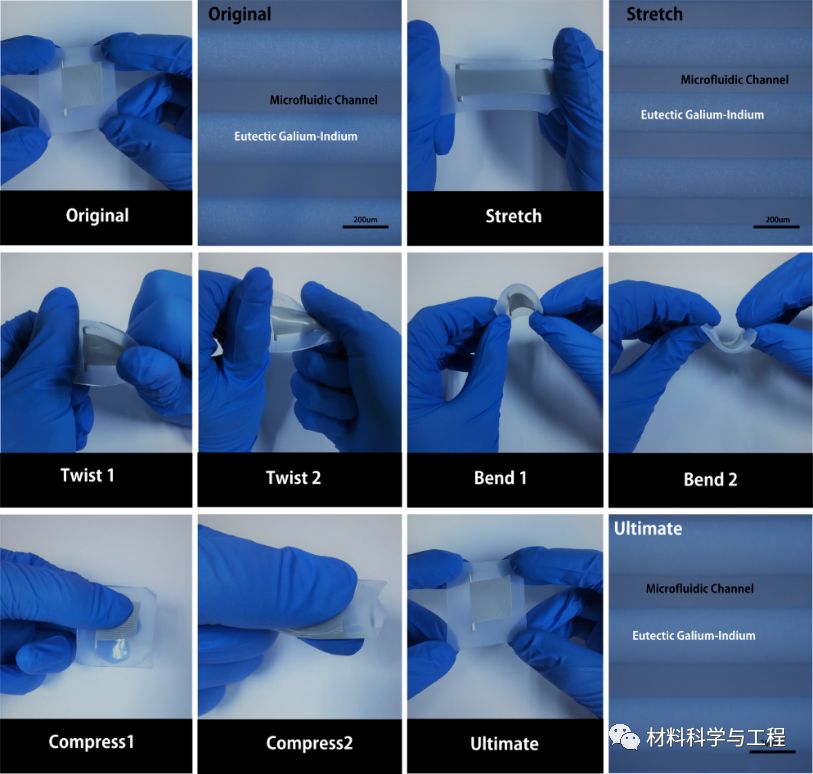
柔性傳感器的拉伸、扭轉和彎曲

超高可拉伸傳感器的拉伸實驗
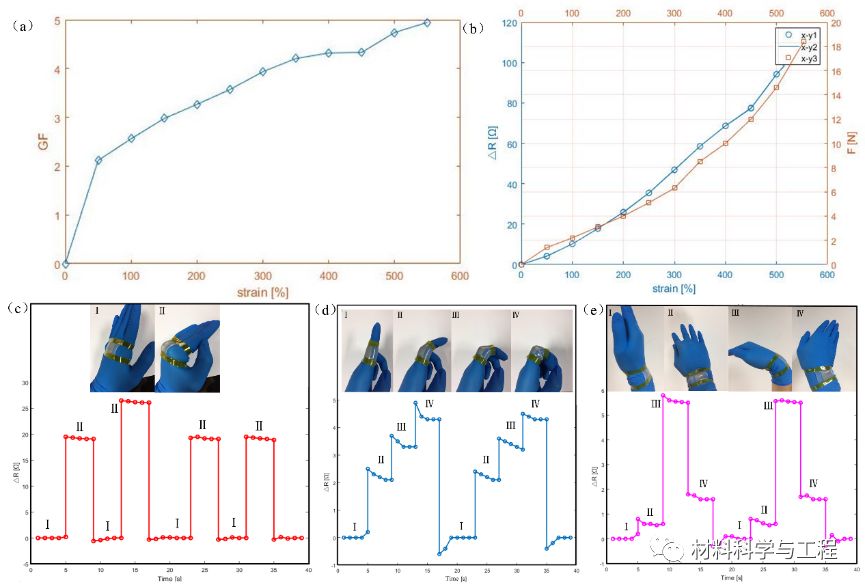
可拉伸傳感器的特性分析和應用示范
免責聲明:本網站所轉載的文字、圖片與視頻資料版權歸原創作者所有,如果涉及侵權,請第一時間聯系本網刪除。
相關文章

官方微信
《中國腐蝕與防護網電子期刊》征訂啟事
- 投稿聯系:編輯部
- 電話:010-62313558-806
- 郵箱:fsfhzy666@163.com
- 中國腐蝕與防護網官方QQ群:140808414
點擊排行
PPT新聞

“海洋金屬”——鈦合金在艦船的
點擊數:5768

腐蝕與“海上絲綢之路”
點擊數:4763